This paper was first published in August 2000, as per [NTP.org](htt...
### VMS
OpenVMS, also known as VMS, is a multi-user, multiprocessi...
NCC 79 refers to the National Computer Conference in 1979. This eve...
You can find a repository with the source code for several NTP impl...
[RFC-778](https://www.ntp.org/reflib/rfc/rfc778.txt), titled "DCNET...
### Hello Routing Protocol
The Hello routing protocol, as document...
### Fuzzball
Fuzzball was an early network prototyping and testbed...
Offset and delay calculations are a critical part of NTP. These cal...
Jitter is the variation in the time of arrival of packets at the re...
The NTP Version 1, as documented in [RFC-1059](https://www.ntp.org/...
RFC-1119 was notable for being the first RFC published in PostScrip...
### Project Athena
Project Athena, initiated around 1985 at the Ma...
During the 80s and 90s cryptographic technology underwent significa...
The Spectracom WWVB receiver was a specialized radio receiver desig...
A LORAN-C receiver is a device used to receive signals from the L...
Zork, a pioneering interactive fiction game developed in the late 1...
WWVB and DCF77 are longwave radio stations transmitting time signal...

1
A Brief History of NTP Time: Confessions of an Internet Timekeeper
1,2
David L. Mills, Fellow ACM, Senior Member IEEE
3
Abstract
This paper traces the origins and evolution of the Network Time Protocol (NTP) over two decades of con-
tinuous operation. The technology has been continuously improved from hundreds of milliseconds in the
rowdy Internet of the early 1980s to tens of nanoseconds in the Internet of the new century. It includes a
blend of history lesson and technology reprise, but with overtones of amateur radio when a new country
shows up on the Internet with NTP running.
This narrative is decidedly personal, since the job description for an Internet timekeeper is highly individ-
ualized and invites very few applicants. There is no attempt here to present a comprehensive tutorial, only
a almanac of personal observations, eclectic minutae and fireside chat. Many souls have contributed to the
technology, some of which are individually acknowledged in this paper, the rest too numerous left to
write their own memoirs.
Keywords: computer network, time synchronization,
technical history, algorithmic memoirs
1. Introduction
An argument can be made that the Network Time Proto-
col (NTP) is the longest running, continuously operat-
ing, distributed application in the Internet. As NTP is
approaching its third decade, it is of historic interest to
document the origins and evolution of the architecture,
protocol and algorithms. Not incidentally, NTP was an
active participant in the early development of the Inter-
net technology and its timestamps recorded many mile-
stones in measurement and prototyping programs.
This paper documents significant milestones in the evo-
lution of computer network timekeeping technology
over four generations of NTP to the present. The NTP
software distributions for Unix, Windows and VMS has
been maintained by a corps of almost four dozen volun-
teers at various times. There are too many to list here,
but the major contributors are revealed in the discussion
to follow. The current NTP software distribution, docu-
mentation and related materials, newsgroups and links
are on the web at www.ntp.org. In addition, all papers
and reports cited in this paper (except [23]) are in Post-
Script and PDF at www.eecis.udel.edu/~mills. Further
information, including executive summaries, project
reports and briefing slide presentations are at
www.eecis.udel.edu/~mills/ntp.htm.
There are three main threads interwoven in the follow-
ing. First is a history lesson on significant milestones for
the specifications, implementations and coming-out par-
ties. These milestones calibrate and are calibrated by
developments elsewhere in the Internet community. Sec-
ond is a chronology of the algorithmic refinements lead-
ing to better and better accuracy, stability and robustness
that continue to the present. These algorithms represent
the technical contributions as documented in the refer-
ences. Third is a discussion of the various proof-of-per-
formance demonstrations and surveys conducted over
the years, each attempting to outdo the previous in cali-
brating the performance of NTP in the Internet of the
epoch. Each of these three threads winds through the
remainder of this narrative.
2. On the Antiquity of NTP
NTP’s roots can be traced back to a demonstration at
NCC 79 believed to be the first public coming-out party
of the Internet operating over a transatlantic satellite net-
work. However, it was not until 1981 that the synchroni-
zation technology was documented in the now historic
Internet Engineering Note series as IEN-173 [35]. The
first specification of a public protocol developed from it
1. Sponsored by: DARPA Information Technology Office Order G409/J175, Contract F30602-98-1-0225, and Dig-
ital Equipment Corporation Research Agreement 1417.
2. This document has been submitted for publication. It is provided as a convenience to the technical community
and should not be cited or redistributed.
3. Author’s address: Electrical and Computer Engineering Department, University of Delaware, Newark, DE
19716, mills@udel.edu, http://www.eecis.udel.edu/~mills.
2
appeared in RFC-778 [34]. The first deployment of the
technology in a local network was as an integral func-
tion of the Hello routing protocol documented in RFC-
891 [32], which survived for many years in a network
prototyping and testbed operating system called the
Fuzzball [24].
What later became known as NTP Version 0 was imple-
mented in 1985, both in Fuzzball by this author and in
Unix by Louis Mamakos and Michael Petry at U Mary-
land. Fragments of their code survive in the software
running today. RFC-958 contains the first formal speci-
fication of this version [29], but it did little more than
document the NTP packet header and offset/delay calcu-
lations still used today. Considering the modest speeds
of networks and computers of the era, the nominal accu-
racy that could be achieved on an Ethernet was in the
low tens of milliseconds. Even on paths spanning the
Atlantic, where the jitter could reach over one second,
the accuracy was generally better than 100 ms.
Vers i on 1 o f th e N T P sp e cifi cati o n wa s d oc u me nted
three years later in RFC-1059 [27]. It contained the first
comprehensive specification of the protocol and algo-
rithms, including primitive versions of the clock filter,
selection and discipline algorithms. The design of these
algorithms was guided largely by a series of experi-
ments, documented in RFC-956 [31], in which the basic
theory of the clock filter algorithm was developed and
refined. This was the first version which defined the use
of client/server and symmetric modes and, of course, the
first version to make use of the version field in the
header.
A transactions paper on NTP Version 1 appeared in
1991 [21]. This was the first paper that exposed the NTP
model, including the architecture, protocol and algo-
rithms, to the technical engineering community. While
this model is generally applicable today, there have been
a continuing series of enhancements and new features
introduced over years, some of which are described in
following sections.
The NTP Version 2 specification followed as RFC-1119
in 1989 [25]. A completely new implementation slavish
to the specification was built by Dennis Fergusson at U
Toronto. This was the first RFC in PostScript and as
such the single most historically unpopular document in
the RFC publishing process. This document was the first
to include a formal model and state machine describing
the protocol and pseudo-code defining the operations. It
introduced the NTP Control Message Protocol for use in
managing NTP servers and clients, and the crypto-
graphic authentication scheme based on symmetric-key
cryptography, both of which survive to the present day.
There was considerable discussion during 1989 about
the newly announced Digital Time Synchronization Ser-
vice (DTSS) [23], which was adopted for the Enterprise
network. The DTSS and NTP communities had much
the same goals, but somewhat different strategies for
achieving them. One problem with DTSS, as viewed by
the NTP community, was a possibly serious loss of
accuracy, since the DTSS design did not discipline the
clock frequency. The problem with the NTP design, as
viewed from the DTSS community, was the lack of for-
mal correctness principles in the design process. A key
component in the DTSS design upon which the correct-
ness principles were based was an agreement algorithm
invented by Keith Marzullo in his dissertation.
In the finest Internet tradition of stealing good ideas, the
Marzullo algorithm was integrated with the existing
suite of NTP mitigation algorithms, including the filter-
ing, clustering and combining algorithms, which the
DTSS design lacked. However, the Marzullo algorithm
in its original form produced excessive jitter and seri-
ously degraded timekeeping quality over typical Internet
paths. The algorithm, now called the intersection algo-
rithm, was modified to avoid this problem. The resulting
suite of algorithms has survived substantially intact to
the present day, although many modifications and
improvements have been made over the years.
In 1992 the NTP Version 3 specification appeared [18],
again in PostScript and now running some 113 pages.
The specification included an appendix describing a for-
mal error analysis and an intricate error budget includ-
ing all error contributions between the primary reference
source over intervening servers to the eventual client.
This provided the basis to support maximum error and
estimated error statistics, which provide a reliable char-
acterization of timekeeping quality, as well as a reliable
metric for selecting the best from among a population of
available servers. As in the Version 2 specification, the
model was described using a formal state machine and
pseudo code. This version also introduced broadcast
mode and included reference clock drivers in the state
machine.
Lars Mathiesen at U Copenhagen carefully revised the
version 2 implementation to comply with the version 3
specification. There was considerable give and take
between the specification and implementation and some
changes were made in each to reach consensus, so that
the implementation was aligned precisely with the spec-
ification. This was a major effort which lasted over a
year during which the specification and implementation
converged to a consistent formal model.
3
In the years since the version 3 specification, NTP has
evolved in various ways adding new features and algo-
rithm revisions while still preserving interoperability
with older versions. Somewhere along the line, it
became clear that a new version number was needed,
since the state machine and pseudo code had evolved
somewhat from the version 3 specification, so it became
NTP Version 4. The evolution process was begun with a
number of white papers, including [14] and [11].
Subsequently, a simplified version 4 protocol model was
developed for the Simple Network Protocol (SNTP) ver-
sion 4 in RFC-2030 [9]. SNTP is compatible with NTP
as implemented for the IPv4, IPv6 and OSI protocol
stacks, but does not include the crafted mitigation and
discipline algorithms. These algorithms are unnecessary
for an implementation intended solely as a server. SNTP
version 4 has been used in several standalone NTP serv-
ers integrated with GPS receivers.
There is a certain sense of the radio amateur in the
deployment of NTP around the globe. Certainly, each
new country found running NTP was a new notch for the
belt. A particularly satisfying conquest was when the
national standards laboratory of a new country came up
an NTP primary server connected directly to the
national time and frequency ensemble. Internet time-
keepers Judah Levine at NIST and Richard Schmidt at
USNO deployed public NTP primary time servers at
several locations in the US and overseas. There was a
period where NTP was well lit in the US and Europe but
dark elsewhere in South America, Africa and the Pacific
Rim. Today, the Sun never sets or even gets close to the
horizon on NTP. The most rapidly growing populations
are in Eastern Europe and South America, but the real
prize is a new one found in Antarctica. Experience in
global timekeeping is documented in [8].
One of the real problems in fielding a large, complex
software distribution is porting to idiosyncratic hard-
ware and operating systems. There are now over two
dozen ports of the distribution for just about every hard-
ware platform running Unix, Windows and VMS mar-
keted over the last twenty years, some of them truly
historic in their own terms. Various distributions have
run on everything from embedded controllers to super-
computers. Maintaining the configuration scripts and
patch library is a truly thankless job and getting good at
it may not be a career enhancer. Volunteer Harlan Stenn
currently manages this process using modern autocon-
figure tools. New versions are tested first in our research
net DCnet, then in bigger sandboxes like CAIRN and
finally put up for public release at www.ntp.org. The
bug stream arrives at bugs@mail.ntp.org.
At this point the history lesson is substantially complete.
However, along the way several specific advancements
need to be identified. The remaining sections of this
paper discuss a number of them in detail.
3. Autonomous Deployment
It became clear as the NTP development continued that
the most valuable enhancement would be the capability
for a number of clients and servers to automatically con-
figure and deploy in an NTP subnet delivering the best
timekeeping quality, while conserving processor and
network resources. Not only would this avoid the
tedious chore of engineering specific configuration files
for each server and client, but it would provide a robust
response and reconfiguration scheme should compo-
nents of the subnet fail. The DTSS model described in
[23] goes a long way to achieve this goal, but has serious
deficiencies, notably the lack of cryptographic authenti-
cation. The following discussion summarizes the
progress toward that goal.
Some time around 1985 Project Athena at MIT was
developing the Kerberos security model, which provides
cryptographic authentication of users and services. Fun-
damental to the Kerberos design is the ticket used to
access computer and network services. Tickets have a
designated lifetime and must be securely revoked when
their lifetime expires. Thus, all Kerberos facilities had to
have secure time synchronization services. While the
NTP protocol contains specific provisions to deflect
bogus packets and replays, these provisions are inade-
quate to deflect more sophisticated attacks such as mas-
querade. To deflect these attacks NTP packets were
protected by a cryptographic message digest and private
key. This scheme used the Digital Encryption Standard
operating in Cipher Block Chaining mode (DES-CBC).
Provision of DES-based source authentication created
problems for the public software distribution. Due to the
International Trade in Arms Regulations (ITAR) at the
time, DES could not be included in NTP distributions
exported outside the US and Canada. Initially, the way
to deal with this was to provide two versions of DES in
the source code, one operating as an empty stub and the
other with the algorithm but encrypted with DES and a
secret key. The idea was that, if a potential user could
provide proof of residence, the key was revealed. Later,
this awkward and cumbersome method was replaced
simply by maintaining two distributions, one intended
for domestic use and the other for export. Recipients
were placed on their honor to fetch the politically cor-
rect version.
4
However, there was still the need to authenticate NTP
packets in the export version. Louis Mamakos of U
Maryland adapted the MD5 message digest algorithm
for NTP. This algorithm is specifically designed for the
same function as the DES-CBC algorithm, but is free of
ITAR restrictions. In NTP Version 4 the export distribu-
tion has been discontinued and the DES source code
deleted; however, the algorithm interface is compatible
with widely available cryptographic libraries, such as
rsaref2.0 from RSA Laboratories. If needed, there are
numerous sources of the DES source code from foreign
archive sites, so it is readily possible to obtain it and
install in the standard distribution.
While MD5-based source authentication has worked
well, it requires secret keys, which complicates key dis-
tribution and, especially for multicast-based modes, is
vulnerable to compromise. Public-key cryptography
simplifies key distribution, but can severely degrade
timekeeping quality. The Internet Engineering Task
Force (IETF) has defined several cryptographic algo-
rithms and protocols, but these require persistent state,
which is not possible in some NTP modes. Some appre-
ciation of the problems is apparent from the observation
that secure timekeeping requires secure cryptographic
media, but secure media require reliable lifetime
enforcement [4]. The implied circularity applies to any
secure time synchronization service, including NTP.
These problems were addressed in NTP Version 4 with a
new security model and protocol called Autokey.
Autokey uses a combination of public-key cryptography
and a pseudo-random keystream [1]. Since public-key
cryptography hungers for large chunks of processor
resources and can degrade timekeeping quality, the algo-
rithms are used sparingly in an offline mode to sign and
verify time values, while the much less expensive key-
stream is used to authenticate the packets relative to the
signed values. Furthermore, Autokey is completely self-
configuring, so that servers and clients can be deployed
and redeployed in an arbitrary topology and automati-
cally exchange signed values without manual interven-
tion. Further information is available at
www.eecid.udel.edu/~mills/autokey.htm.
The flip side of autonomous deployment is how a ragtag
bunch of servers and clients randomly deployed in a net-
work substrate can find each other and automatically
configure which servers directly exchange time values
and which depend on intervening servers. The technol-
ogy which supports this feature is called Autoconfigure
and has evolved as follows.
In the beginning, almost all NTP servers operated in cli-
ent/server mode, where a client sends requests at inter-
vals ranging from one minute to tens of minutes,
depending on accuracy requirements. In this mode time
values flow outward from the primary servers through
possibly several layers of secondary servers to the cli-
ents. In some cases involving multiply redundant serv-
ers, peers operate in symmetric mode and values can
flow from one peer to the other or vice versa, depending
on which one is closest to the primary source according
to a defined metric. Some institutions like U Delaware
and GTE, for example, operate multiple primary servers,
each connected to one or more redundant radio and sat-
ellite receivers using different dissemination services.
This forms an exceptionally robust synchronization
source for both on-campus and off-campus public
access.
In NTP Version 3, configuration files had to be con-
structed manually using information found in the lists of
public servers at www.ntp.org, although some sites par-
tially automated the process using crafted DNS records.
Where very large numbers of clients are involved, such
as in large corporations with hundreds and thousands of
personal computers and workstations, the method of
choice is broadcast mode, which was added in NTP Ver-
sion 3, or multicast mode, which was added in NTP Ver-
sion 4.
However, since clients to not send to servers, there was
no way to calibrate and correct for the server-client
propagation delay in NTP Version 3. This is provided in
NTP Version 4 by a protocol modification in which the
client, once receiving the first broadcast packet, exe-
cutes a volley of client/server exchanges in order to cali-
brate the delay and then reverted to listen-only mode.
Coincidentally, this initial exchange is used by the
Autokey protocol to retrieve the server credentials and
verify its authenticity.
Notwithstanding the progress toward a truly autono-
mous deployment capability described here, there still
remains work to be done. The current research project
funded by DARPA under the Next Generation Internet
program is actively pursuing this goal, as discussed in a
following section.
4. Radios, we have Radios
For as many years as NTP has ticked on this planet, the
definitive source for public NTP servers has been a set
of tables, one for primary servers and the other for sec-
ondary servers, maintained at www.ntp.org. Each server
in those tables is operated as a public service and main-
tained by a volunteer staff. Primary (stratum 1) servers
have up to several hundred clients and a few operated by
NIST and USNO may have several times that number. A
5
stratum-1 server requires a primary reference source,
usually a radio or satellite receiver or modem. Following
is a history lesson on the development and deployment
of NTP stratum-1 servers.
The first use of radios as a primary reference source was
in 1981 when a Spectracom WWVB receiver was con-
nected to a Fuzzball at COMSAT Laboratories in
Clarksburg, MD [34]. This machine provided time syn-
chronization for Fuzzball LANs in Washington, Lon-
don, Oslo and later Munich. These LANs were used in
the DARPA Atlantic Satellite program for satellite mea-
surements and protocol development. Later, the LANs
were used to watch the national power grids of the US,
UK and Norway swish and sway over the heating and
cooling seasons [30].
DARPA purchased four of the Spectracom WWVB
receivers, which were hooked up to Fuzzballs at MIT
Lincoln Laboratories, COMSAT Laboratories, USC
Information Sciences Institute, and SRI International.
The radios were redeployed in 1986 in the NSF Phase I
backbone network, which used Fuzzball routers [26]. It
is a tribute to the manufacturer that all four radios are
serviceable today; two are in regular operation at U Del-
aware, a third serves as backup spare and the fourth is in
the Boston Computer Museum.
These four radios, together with a Heath WWV receiver
at COMSAT Laboratories and a pair of TrueTime GOES
satellite receivers at Ford Motor Headquarters and later
at Digital Western Research Laboratories, provided pri-
mary time synchronization services throughout the
ARPANET, MILNET and dozens of college campuses,
research institutions and military installations. By 1988
two Precision Standard Time WWV receivers joined the
flock, but these along with the Heath WWV receiver are
no longer available. From the early 1990s these nine
pioneer radio-equipped Internet time servers were
joined by an increasing number of volunteer radio-
equipped servers now numbered over 100 in the public
Internet.
As the cost of GPS receivers plummeted from the strato-
sphere (the first one this author bought cost $17,000),
these receivers started popping up all over the place. In
the US and Canada the longwave radio alternative to
GPS is WWVB transmitting from Colorado, while in
Europe it is DCF77 from Germany. However, shortwave
radio WWV from Colorado, WWVH from Hawaii and
CHU from Ottawa have been useful sources. While
GOES satellite receivers are available, GPS receivers are
much less expensive than GOES and provide better
accuracy. Over the years some 37 clock driver modules
supporting these and virtually every radio, satellite and
modem national standard time service in the world have
been written for NTP.
Recent additions to the driver library include drivers for
the WWV, WWVH and CHU transmissions that work
directly from an ordinary shortwave receiver and audio
sound card or motherboard codec. Some of the more
exotic drivers built in our laboratory include a computer-
ized LORAN-C receiver with exceptional stability [19]
and a DSP-based WWV demodulator/decodor using
theoretically optimal algorithms [6].
5. Hunting the Nanoseconds
When the Internet first wound up the NTP clockspring,
computers and networks were much, much slower than
today. A typical WAN speed was 56 kb/s, about the
speed of a telephone modem of today. A large timeshar-
ing computer of the day was the Digital Equipment
TOPS-20, which wasn’t a whole lot faster, but did run an
awesome version of Zork. This was the heyday of the
minicomputer, the most ubiquitous of which was the
Digital Equipment PDP11 and its little brother the LSI-
11. NTP was born on these machines and grew up with
the Fuzzball operating system. There were about two
dozen Fuzzballs scattered at Internet hotspots in the US
and Europe. They functioned as hosts and gateways for
network research and prototyping and so made good
development platforms for NTP.
In the early days most computer hardware clocks were
driven by the power grid as the primary timing source.
Power grid clocks have a resolution of 16 or 20 ms,
depending on country, and the uncorrected time can
wander several seconds over the day and night, espe-
cially in summertime. While power grid clocks have
rather dismal performance relative to accurate civil time,
they do have an interesting characteristic, at least in
areas of the country that are grid-synchronous. Early
experiments in time synchronization and network mea-
surement could assume the time offsets between grid-
synchronized clocks was constant, since they all ran at
the same Hertz, so all NTP had to do was calibrate the
constant offsets.
Later, clocks were driven by an oscillator stabilized by a
quartz crystal resonator, which is much more stable than
the power grid, but has the disadvantage that the intrin-
sic frequency offset between crystal clocks can reach
several hundred parts-per-million (PPM) or several sec-
onds per day. In fact, over the years only Digital has
paid particular attention to the manufacturing tolerance
of the clock oscillator, so their machines make the best
timekeepers. In fact, this is one of the reasons why all

6
the primary time servers operated by NIST are Digital
Alphas.
As crystal clocks came into widespread use, the NTP
clock discipline algorithm was modified to adjust the
frequency as well as the time. Thus, an intrinsic offset of
several hundred PPM could be reduced to a residual in
the order of 0.1 PPM and residual timekeeping errors to
the order of a clock tick. Later designs decreased the
tick from 16 or 20 ms to 4 ms and eventually to 1 ms in
the Alpha. The Fuzzballs were equipped with a hard-
ware counter/timer with 1-ms tick, which was consid-
ered heroic in those days.
To achieve resolutions better than one tick, some kind of
auxiliary counter is required. Early Sun SPARC
machines had a 1-MHz counter synchronized to the tick
interrupt. In this design, the seconds are numbered by
the tick interrupt and the microseconds within the sec-
ond read directly from the counter. In principle, these
machines could keep time to 1 µs, assuming that NTP
could discipline the clocks between machines to this
order. In point of fact, performance was limited to a few
milliseconds, both because of network and operating
system jitter and also because of small varying fre-
quency excursions induced by ambient temperature vari-
ations.
Analysis, simulation and experiment led to continuing
improvements in the NTP clock discipline algorithm,
which adjusts the clock time and frequency in response
to an external source, such as another NTP server or a
local source such as a radio or satellite receiver or tele-
phone modem [16]. As a practical matter, the best time-
keeping requires a directly connected radio; however,
the interconnection method, usually a serial port, itself
has inherent jitter. In addition, the method implemented
in the operating system kernel to adjust the time gener-
ally has limitations of its own [24].
In a project originally sponsored by Digital, components
of the NTP clock discipline algorithm were imple-
mented directly in the kernel. In addition, an otherwise
unused counter was harnessed to interpolate the micro-
seconds in much the same manner as in Sun machines.
In addition to these improvements, a special clock disci-
pline loop was implemented for the pulse-per-second
(PPS) signal produced by some radio clocks and preci-
sion oscillators. The complete design and application
interface was reported in [13], some sections of which
appeared as RFC-1589 [15], produced in the first true
microsecond clock that could be disciplined from an
external source. Other issues related to precision Inter-
net timekeeping were discussed in the paper [10].
An interesting application of this technology was in
Norway, where a Fuzzball NTP primary time server was
connected to a cesium frequency standard with PPS out-
put. In those days the Internet bridging the US and
Europe had notoriously high jitter, in some cases peaks
reaching over one second. The cesium standard and ker-
nel discipline maintained constant frequency, but did not
provide a way to number the seconds. NTP provided this
function via the Internet and other primary servers. The
experience with very high jitter resulted in special non-
linear signal processing code, called the popcorn spike
suppressor, in the NTP clock discipline algorithm.
Still, network and computer speeds were reaching
higher and higher. The time to cycle through the kernel
and back, once 40 µs in a Sun SPARC IPC, was decreas-
ing to a microsecond or two in a Digital Alpha. In order
to insure a reliable ordering of events, the need was
building to improve the clock resolution better than 1 µs
and the nanosecond seemed a good target. Where the
operating system and hardware justified it, NTP now
disciplines the clock in nanoseconds. In addition, the
NTP Version 4 implementation switched from integer
arithmetic to floating double, which provides much
more precise control over the clock discipline process.
For the ultimate accuracy, the original microsecond ker-
nel was overhauled to support a nanosecond clock con-
forming to the PPS interface specified in RFC-2783 [3].
Nanosecond kernels have been built and tested for
SunOS, Alpha, Linux and FreeBSD systems, the latter
two of which include the code in current system ver-
sions. The results with the new kernel demonstrate that
the residual RMS error with modern hardware and a pre-
cision PPS signal is in the order of 50 ns [1]. The skeptic
should see Figure 1, although admittedly this shows the
jitter and not the systematic offset, which must be cali-
brated out.
0 5 10 15 20 25
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Time Offset (us)
Time (hr)
Figure 1. Nanokernel Clock Discipline with PPS
Signal on Alpha 433au (from [MIL00b])
7
This represents the state of the art in current timekeep-
ing practice. Having come this far, the machine used by
this author now runs at 1 GHz and can chime with
another across the country at 100 Mb/s, which raises the
possibility of a picosecond clock. The inherent resolu-
tion of the NTP timestamp is about 232 picoseconds,
which suggests we soon might approach that limit and
require rethinking the NTP protocol design. At these
speeds NTP could be used to synchronize the mother-
board CPU and ASIC oscillators using optical intercon-
nects.
6. Analysis and Experiment
Over the years a good deal of effort has gone into the
analysis of computer clocks and methods to stabilize
them in frequency and time. As networks and computers
have become faster and faster, the characterization of
computer clock oscillators and the evolution of synchro-
nization technology has continuously evolved to match.
Following is a technical timeline on the significant
events in this progress.
When the ICMP protocol divorced from the first Internet
routing protocol GGP, one of the first functions added to
ICMP was the ICMP Timestamp message, which is sim-
ilar to the ICMP Echo message, but carries timestamps
with millisecond resolution. Experiments with these
messages used Fuzzballs and the very first implementa-
tion of ICMP. In fact, the first use of the name PING
(Packet InterNet Groper) can be found in RFC-889 [33].
While the hosts and gateways did not at first synchro-
nize clocks, they did record timestamps with a granular-
ity of 16 ms or 1 ms, which could be used to measure
roundtrip times and synchronize experiments after the
fact. Statistics collected this way were used for the anal-
ysis and refinement of early TCP algorithms, especially
the parameter estimation schemes used by the retrans-
mission timeout algorithm.
The first comprehensive survey of NTP operating in the
Internet was published in 1985 [30]. Later surveys
appeared in 1990 [24] and 1997 [8]. The latest survey
was a profound undertaking. It attempted to find and
expose every NTP server and client in the public Inter-
net using data collected by the standard NTP monitoring
tools. After filtering to remove duplicates and falsetick-
ers, the survey found over 185,000 client/server associa-
tions in over 38,000 NTP servers and clients. The results
reported in [8] actually represented only a fraction of the
total number of NTP servers and clients. It is known
from other sources that many thousands of NTP servers
and clients lurk behind firewalls where the monitoring
programs can’t find them. Extrapolating from data pro-
vided about the estimated population in Norway, it is a
fair statement that well over 100,000 NTP daemons are
chiming the Internet and more likely several times that
number. Recently, a NTP client was found hiding in a
standalone print server. The next one may be found in an
alarm clock.
The paper [20] is a slightly tongue-in-cheek survey of
the timescale, calendar and metrology issues involved in
computer network timekeeping. Of particular interest in
that paper was how to deal with leap seconds in the UTC
timescale. While provisions are available in NTP to dis-
seminate leap seconds throughout the NTP timekeeping
community, means to anticipate their scheduled occur-
rence was not implemented in radio, satellite and
modem services until relatively recently and not all
radios and only a handful of kernels support them. If
fact, on the thirteen occasions since NTP began in the
Internet the behavior of the NTP subnet on and shortly
after each leap second could only be described in terms
of a pinball machine.
The fundamentals of computer network time synchroni-
zation technology was presented in the report [17],
which remains valid today. That report set forth mathe-
matically precise models for error analysis, transient
response and clock discipline principles. Various sec-
tions of that report were condensed and refined in the
paper [16].
In a series of careful measurements over a period of two
years with selected servers in the US, Australia and
Europe, an analytical model of the idiosyncratic com-
puter clock oscillator was developed and verified. While
a considerable body of work on this subject has acreted
in the literature, the object of study has invariably been
precision oscillators of the highest quality used as time
and frequency standards. Computer oscillators have no
such pedigree, since there are generally no provisions to
stabilize the ambient environment, in particular the crys-
tal temperature.
The work reported in the paper [12] further extended
and refined the model evolved from the [16] paper and
its predecessors. It introduced the concept of Allan devi-
ation, a statistic useful for the characterization of oscil-
lator stability. A typical plot on log-log coordinates is
shown in Figure 2. The paper also reported on the
results of ongoing experiments to estimate this statistic
using workstations and the Internet of that era. This
work was further extended and quantified in the report
[7], portions of which were condensed in the paper [5].
This paper presented the Allan intercept model which
characterizes typical computer oscillators. The Allan
intercept is the point (x, y) where the straight-line
asymptotes for each NTP source shown intersect. This

8
work resulted in a hybrid algorithm, implemented in
NTP Version 4, which both improves performance over
typical Internet paths and allows the clock adjustment
intervals to be substantially increased without degrading
accuracy. A special purpose simulator including sub-
stantially all the NTP algorithms was used to verify pre-
dicted behavior with both simulated and actual data over
the entire envelope of frenetic Internet behaviors.
7. As Time Goes By
At the beginning of the new century it is quite likely that
precision timekeeping technology has evolved about as
far as it can given the realities of available computer
hardware and operating systems. Using specially modi-
fied kernels and available interface devices, Poul-Hen-
ning Kamp and this author have demonstrated that
computer time in a modern workstation can be disci-
plined within some tens of nanoseconds relative to a
precision source such as a cesium or rubidium frequency
standard [1]. While not many computer applications
would justify such heroic means, the demonstration sug-
gests that the single most useful option for high perfor-
mance timekeeping in a modern workstation may be a
temperature compensated or stabilized oscillator.
In spite of the protocol modification, broadcast mode
provides somewhat less accuracy than client/server
mode, since it does not track variations due to routing
changes or network loads. In addition, it is not easily
adapted for autonomous deployment. In NTP Version 4
a new manycast mode was added where a client sends to
an IP multicast group address and a server listening on
this address responds with a unicast packet, which then
mobilizes an association in the client. The client contin-
ues operation with the server in ordinary client/server
mode. While manycast mode has been implemented and
tested in NTP Version 4, further refinements are needed
to avoid implosions, such as using an expanding-ring
search, and to manage the population found, possibly
using crafted scoping mechanisms.
Manycast mode has the potential to allow at least mod-
erate numbers of servers and clients to nucleate about a
number of primary servers, but the full potential for
autonomous deployment can be realized only using
symmetric mode, where the NTP subnet can grow and
flex in fully distributed and dynamic ways. In his disser-
tation Ajit Thyagarajan examines a class of heuristic
algorithms that may be useful management candidates.
Meanwhile, the quest for new technology continues.
While almost all time dissemination means in the world
are based on Coordinated Universal Time (UTC), some
users have expressed the need for International Atomic
Time (TAI), including means to metricate intervals that
span multiple leap seconds. NTP Version 4 includes a
primitive mechanism to retrieve a table of historic leap
seconds from NIST servers and distribute it throughout
the NTP subnet. However, at this writing a suitable API
has yet to be designed and implemented, then navigate
the IETF standards process. Refinements to the Autokey
protocol are needed to insure only a single copy of this
table, as well as cryptographic agreement parameters, is
in use throughout the NTP subnet and can be refreshed
in a timely way.
It is likely that future deployment of public NTP ser-
vices might well involve an optional timestamping ser-
vice, perhaps for-fee. This agenda is being pursued in a
partnership with NIST and Certified Time, Inc. In fact,
several NIST servers are now being equipped with
timestamping services. This makes public-key authenti-
cation a vital component of such a service, especially if
the Sun never sets on the service area.
8. Acknowledgements
Internet timekeeping is considered by many to be a
hobby, and even this author has revealed a likeness to
amateur radio. There seems no other explanation why
the volunteer timekeeper corps has continued so long to
improve the software quality, write clock drivers for
every new radio that comes along and port the stuff to
new hardware and operating systems. The generals in
the army have been revealed in the narrative here, but
the many soldiers of the trench must be thanked as well,
especially when the hardest job is convincing the boss
that time tinkering is good for business.
10
0
10
5
10
−3
10
−2
10
−1
10
0
10
1
10
2
10
3
NOISE
PPS
LAN
BARN
PEERS
USNO
IEN
Allan Deviation (PPM)
Time Interval (s)
Figure 2. Allan Deviation Plot (from [MIL98])
9
9. References (reverse chronological order)
Note: The following papers and reports, with the excep-
tion of [23] are available in PostScript and PDF at
www.eecis.udel.edu/~mills.
1. Mills, D.L. The Nanokernel. Software and docu-
mentation, including test results, at www.ntp.org.
2. Mills, D.L. Public key cryptography for the Net-
work Time Protocol. Electrical Engineering
Report 00-5-1, University of Delaware, May
2000. 23 pp.
3. Mogul, J., D. Mills, J. Brittenson, J. Stone and U.
Windl. Pulse-per-second API for Unix-like oper-
ating systems, version 1. Request for Comments
RFC-2783, Internet Engineering Task Force,
March 2000, 31 pp.
4. Mills, D.L. Cryptographic authentication for real-
time network protocols. In: AMS DIMACS Series
in Discrete Mathematics and Theoretical Com-
puter Science, Vol. 45 (1999), 135-144.
5. Mills, D.L. Adaptive hybrid clock discipline algo-
rithm for the Network Time Protocol. IEEE/ACM
Trans. Networking 6, 5 (October 1998), 505-514.
6. Mills, D.L. A precision radio clock for WWV
transmissions. Electrical Engineering Report 97-
8-1, University of Delaware, August 1997, 25 pp.
7. Mills, D.L. Clock discipline algorithms for the
Network Time Protocol Version 4. Electrical
Engineering Report 97-3-3, University of Dela-
ware, March 1997, 35 pp.
8. Mills, D.L., A. Thyagarajan and B.C. Huffman.
Internet timekeeping around the globe. Proc. Pre-
cision Time and Time Interval (PTTI) Applications
and Planning Meeting (Long Beach CA, Decem-
ber 1997), 365-371.
9. Mills, D.L. Simple network time protocol (SNTP)
version 4 for IPv4, IPv6 and OSI. Network Work-
ing Group Report RFC-2030, University of Dela-
ware, October 1996, 18 pp.
10. Mills, D.L. The network computer as precision
timekeeper. Proc. Precision Time and Time Inter-
val (PTTI) Applications and Planning Meeting
(Reston VA, December 1996), 96-108.
11. Mills, D.L. Proposed authentication enhance-
ments for the Network Time Protocol version 4.
Electrical Engineering Report 96-10-3, University
of Delaware, October 1996, 36 pp.
12. Mills, D.L. Improved algorithms for synchroniz-
ing computer network clocks. IEEE/ACM Trans.
Networks 3, 3 (June 1995), 245-254.
13. Mills, D.L. Unix kernel modifications for preci-
sion time synchronization. Electrical Engineering
Department Report 94-10-1, University of Dela-
ware, October 1994, 24 pp.
14. Mills, D.L, and A. Thyagarajan. Network time
protocol version 4 proposed changes. Electrical
Engineering Department Report 94-10-2, Univer-
sity of Delaware, October 1994, 32 pp.
15. Mills, D.L. A kernel model for precision time-
keeping. Network Working Group Report RFC-
1589, University of Delaware, March 1994. 31 pp.
16. Mills, D.L. Precision synchronization of computer
network clocks. ACM Computer Communication
Review 24, 2 (April 1994). 28-43.
17. Mills, D.L. Modelling and analysis of computer
network clocks. Electrical Engineering Depart-
ment Report 92-5-2, University of Delaware, May
1992, 29 pp.
18. Mills, D.L. Network Time Protocol (Version 3)
specification, implementation and analysis. Net-
work Working Group Report RFC-1305, Univer-
sity of Delaware, March 1992, 113 pp.
19. Mills, D.L. A computer-controlled LORAN-C
receiver for precision timekeeping. Electrical
Engineering Department Report 92-3-1, Univer-
sity of Delaware, March 1992, 63 pp.
20. Mills, D.L. On the chronology and metrology of
computer network timescales and their application
to the Network Time Protocol. ACM Computer
Communications Review 21, 5 (October 1991), 8-
17.
21. Mills, D.L. Internet time synchronization: the Net-
work Time Protocol. IEEE Trans. Communica-
tions COM-39, 10 (October 1991), 1482-1493.
22. Mills, D.L. On the accuracy and stability of clocks
synchronized by the Network Time Protocol in the
Internet system. ACM Computer Communication
Review 20, 1 (January 1990), 65-75.
23. Digital Time Service Functional Specification
Ve r si on T.1. 0 .5. D i gi tal E qui p m en t C orp ora t io n,
1989.
24. Mills, D.L. Measured performance of the Network
Time Protocol in the Internet system. Network
10
Wor kin g G ro up R epo rt R FC-1128. Universi ty of
Delaware, October 1989, 18 pp.
25. Mills, D.L. Network Time Protocol (Version 2)
specification and implementation. Network Work-
ing Group Report RFC-1119, 61 pp. University
October 1989, 27 pp.
26. Mills, D.L. The Fuzzball. Proc. ACM SIGCOMM
88 Symposium (Palo Alto CA, August 1988), 115-
122.
27. Mills, D.L. Network Time Protocol (Version 1)
specification and implementation. Network Work-
ing Group Report RFC-1059. University of Dela-
ware, July 1988.
28. Mills, D.L., and H.-W. Braun. The NSFNET
Backbone Network. Proc. ACM SIGCOMM 87
Symposium (Stoweflake VT, August 1987), 191-
196.
29. Mills, D.L. Network Time Protocol (NTP). Net-
work Working Group Report RFC-958, M/A-
COM Linkabit, September 1985.
30. Mills, D.L. Experiments in network clock syn-
chronization. Network Working Group Report
RFC-957, M/A-COM Linkabit, September 1985.
31. Mills, D.L. Algorithms for synchronizing network
clocks. Network Working Group Report RFC-
956, M/A-COM Linkabit, September 1985.
32. Mills, D.L. DCN local-network protocols. Net-
work Working Group Report RFC-891, M/A-
COM Linkabit, December 1983.
33. Mills, D.L. Internet delay experiments. Network
Working Group Report RFC-889, M/A-COM
Linkabit, December 1983.
34. Mills, D.L. DCNET internet clock service. Net-
work Working Group Report RFC-778, COMSAT
Laboratories, April 1981.
35. Mills, D.L. Time synchronization in DCNET
hosts. Internet Project Report IEN-173, COMSAT
Laboratories, February 1981.
WWVB and DCF77 are longwave radio stations transmitting time signals in different regions with distinct frequencies. WWVB, located near Fort Collins, Colorado, USA, is operated by the National Institute of Standards and Technology (NIST) and broadcasts on a frequency of 60 kHz, transmitting the official U.S. time. On the other hand, DCF77, based in Mainflingen near Frankfurt am Main, Germany, is operated by the Physikalisch-Technische Bundesanstalt (PTB) and broadcasts at 77.5 kHz, providing the official German time.
This paper was first published in August 2000, as per [NTP.org](https://www.ntp.org/reflib/memos/).
Offset and delay calculations are a critical part of NTP. These calculations are used to estimate the time difference between a client and a server and to adjust for any network delay.
### Offset
The offset, typically denoted as $\theta$, is a measure of the difference in time between a client's clock and a server's clock. It's essentially the amount by which the client's clock needs to be adjusted (either forward or backward) to synchronize with the server's clock.
When a client sends a request to an NTP server, it records the timestamp of the request $T_{1}$. The server receives this request at $T_{2}$ and sends a response back, recording the timestamp $T_{3}$ when it sends this response. The client receives the response at $T_{4}$.
You can then calculate the offset with the following formula:
$$\theta = \frac{(T_2 - T_1) + (T_3 - T_4)}{2}$$
### Delay
The delay, denoted as $\delta$, represents the round-trip time it takes for a message to travel from the client to the server and back. This measure is crucial in understanding and adjusting for the amount of time that messages take to traverse the network, which can affect synchronization accuracy.
$$ \delta = (T_4 - T_1) - (T_3 - T_2)$$
Zork, a pioneering interactive fiction game developed in the late 1970s at MIT, revolutionized the computer gaming world with its text-based adventure gameplay. Players explore a fantasy world through descriptive text and interact by typing commands, a format that was groundbreaking at the time. Zork stood out for its engaging storytelling, complex puzzles, and an advanced text parser capable of understanding more intricate commands than its contemporaries. Its immense popularity led to a series of sequels and inspired an entire genre of text-based games, cementing its legacy as a seminal influence in the development of narrative and interactive storytelling in video games.
The Spectracom WWVB receiver was a specialized radio receiver designed to capture and decode time signals broadcasted by the WWVB radio station. Operated by the National Institute of Standards and Technology (NIST) near Fort Collins, Colorado, WWVB is known for broadcasting a continuous time signal at a very low frequency of 60 kHz. This signal carries the official U.S. time, ensuring high accuracy and reliability. The receiver's primary role was to accurately interpret these time signals, making it a critical tool for systems requiring precise time synchronization.
NCC 79 refers to the National Computer Conference in 1979. This event was a significant conference in the field of computing and technology, held annually in the United States.
A LORAN-C receiver is a device used to receive signals from the LORAN-C navigation system. LORAN-C, which stands for Long Range Navigation-C, was a terrestrial radio navigation system using low frequency radio transmitters in multiple locations to provide precise navigational coordinates.
### Fuzzball
Fuzzball was an early network prototyping and testbed operating system developed by David Mills for the Digital Equipment Corporation (DEC) PDP11 family of computers.

*Last Known Fuzzball computer*
### Hello Routing Protocol
The Hello routing protocol, as documented in [RFC-891](https://www.ntp.org/reflib/rfc/rfc891.txt), is a networking protocol used for managing routing information within a network. In simple terms, it allows routers to identify and communicate with each other to manage network paths efficiently. The protocol involves routers regularly sending 'hello' messages to each other, enabling them to discover neighboring routers and maintain an understanding of the network topology.
You can find a repository with the source code for several NTP implementations [here](https://github.com/topics/ntp-server).
RFC-1119 was notable for being the first RFC published in PostScript format. The choice of PostScript was seen as a barrier to accessibility, as RFCs were traditionally published in plain text format to ensure they were easily accessible to anyone with basic computing resources. The use of a more complex format was seen as contrary to the open and inclusive ethos of the RFC series. At that time, PostScript, a page description language used primarily for printing, was not widely accessible or readable by the broader internet community. Many people did not have the software or printers capable of handling PostScript files, which made accessing the document difficult.
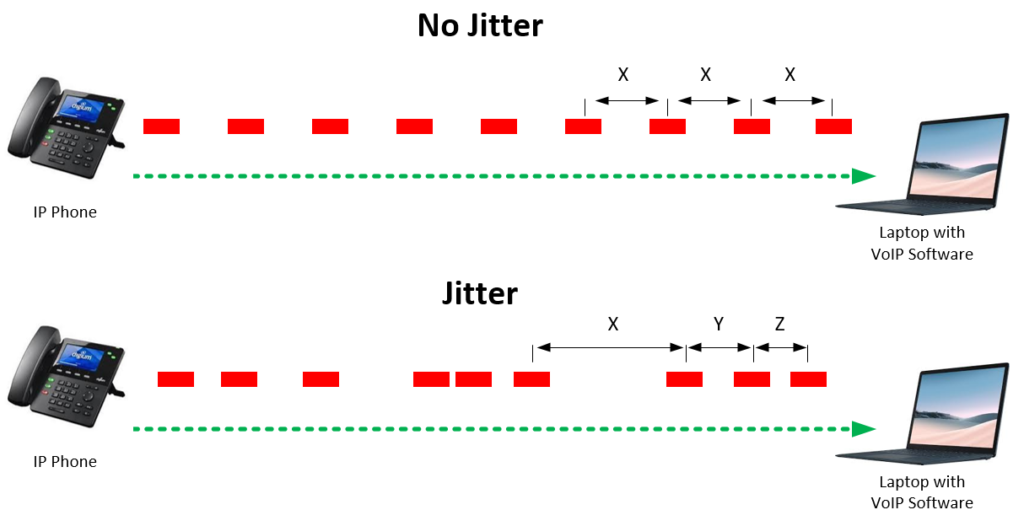
Jitter is the variation in the time of arrival of packets at the receiver compared to when they were sent. It's essentially the inconsistency in packet delay. In the context of NTP, jitter affects the precision of time synchronization because it introduces uncertainty in the delay measurement.
[RFC-778](https://www.ntp.org/reflib/rfc/rfc778.txt), titled "DCNET Internet Clock Service", provides details about an early time synchronization service for computer networks.
### VMS
OpenVMS, also known as VMS, is a multi-user, multiprocessing operating system with virtual memory capabilities. Initially released in 1978, it supports a variety of applications including time-sharing, batch processing, transaction processing, and workstation applications.
The operating system is still widely used across several critical sectors. Its users include banks and financial services, healthcare institutions, telecommunications operators, network information services, and industrial manufacturers. During the 1990s and 2000s, there were about half a million VMS systems globally.
### Project Athena
Project Athena, initiated around 1985 at the Massachusetts Institute of Technology (MIT), was an ambitious and influential undertaking in the field of distributed computing and network security. It represented a significant step forward in how educational institutions approached networked computing environments.
A major contribution of this project was the development of the Kerberos security model. Kerberos is a protocol that provides cryptographic authentication for users and services within a network. The protocol's primary aim was to ensure secure identity verification while mitigating the risks associated with transmitting passwords over the network.
The Kerberos system operates through a ticketing mechanism and a trusted third-party authority, known as the Key Distribution Center (KDC). In this model, each user and service on the network possesses a secret key. The KDC issues tickets that enable secure, authenticated communication between entities on the network. This approach greatly enhances security by avoiding direct password transmission.
The impact of Project Athena, and particularly its development of Kerberos, has been profound and enduring. Kerberos has become a standard protocol for secure authentication across various networked systems, including widespread adoption in Windows domains and UNIX-like operating systems. The project's legacy continues to influence modern network security practices and technologies.
The NTP Version 1, as documented in [RFC-1059](https://www.ntp.org/reflib/rfc/rfc1059.txt), introduced several key algorithms for time synchronization, including the clock filter, selection, and discipline algorithms. Here's a summary of these:
### Clock Filter Algorithm
The clock filter algorithm is designed to manage and mitigate the effects of network jitter and variable delay. It works by maintaining a moving window of the most recent timestamp values (usually the last eight) along with corresponding delay and dispersion estimates. The algorithm then applies statistical filters to this set of values to identify the most reliable and stable time estimate.
### Clock Selection Algorithm
This algorithm is responsible for choosing the best time source from a set of available servers. It evaluates the potential time sources based on their precision and stability. Factors like delay, dispersion, and stratum (a measure of the distance from a reference clock) are considered. The selection process aims to exclude unreliable servers and choose the one that provides the most accurate time reference.
### Clock Discipline Algorithm
The clock discipline algorithm controls the local clock, adjusting its speed and time to match the selected reference clock. It gradually phases in adjustments to avoid abrupt changes in time, which is crucial for maintaining the stability and accuracy of the local clock. This algorithm is also responsible for maintaining the local clock's accuracy when it temporarily loses connectivity with the reference server.
During the 80s and 90s cryptographic technology underwent significant scrutiny and regulation by the United States government, primarily due to its potential military applications. This period was marked by the classification of strong cryptographic software as munitions under the International Trade in Arms Regulations (ITAR). The rationale behind these regulations was rooted in national security concerns, as cryptographic methods were integral to secure military communications.
One of the key regulations affected the export of the Data Encryption Standard (DES), a widely adopted cryptographic algorithm at that time. Under ITAR, the export of DES and similar cryptographic protocols was heavily restricted, especially to countries outside the US and Canada. This stance reflected the government's effort to control the dissemination of powerful cryptographic tools that could be used by foreign powers or adversaries.
Software developers and researchers faced significant challenges due to these regulations. To comply, they often had to devise creative solutions for distributing their software internationally. For example, some provided dual versions of their software: one for domestic use with full cryptographic capabilities and another, less secure version for international export. This approach was not only cumbersome but also sparked a broader debate on the impact of such regulations on the advancement of technology and the free flow of information.